一、前言
在混合动力汽车(hybridelectricvehicles,HEV)的研制过程中,动力耦合器是事关成功与否的关键部件,世界各国都对此进行大量的研究,先后取得了不少成果,并成功地运用于所研制的HEV中,比较典型的是日本丰田公司的THS(toyotahybridsystem)所运用的动力耦合器。
评价一种动力耦合器适用与否的传统方法是进行实物试验,但这需要花费大量的人力、物力与财力,最经济的方法是采用虚拟样机技术进行仿真分析。作者采用ADAMS(automaticdynAmicofmechanicalsystem)仿真软件,对一种新型动力耦合器进行建模与仿真,获得了对这种耦合器的运动学性能与动力学性能的评估,为其后进行混合动力汽车的研究奠定了基础。
二、动力耦合器的功能与设计
早期的动力耦合器有皮带轮与齿轮啮合两种结构。但由于皮带轮传动滑动损失较大,齿轮传动又过于刚性,啮合冲击过大,目前基本上不采用这两种结构,取而代之的是各种轮系。成功的典型除日本丰田的THS外,还有华沙工业大学所开发PHEV所用的单排行星齿轮机构动力耦合器、福特汽车公司PHEV和SPHEV上采用了自行开发的PTH(paralleltransferhybrid)动力耦合器等。
(一)动力耦合器的功能
在PHEV和SPHEV中,动力耦合器是动力组合方式的核心所在。一般来说,动力耦合器必须具有以下4大功能。
(1)动力合成功能 动力耦合器至少要有2个输入端,可以将发动机和驱动电动机的动力分别输入并进行动力合成。
(2)输出不干涉功能 动力耦合器还必须有一个输出端,可以让发动机的动力、驱动电动机的动力单独输出来驱动HEV行驶,或让发动机和驱动电动机的混合动力共同输出来驱动HEV行驶,彼此之间不发生运动干扰,不影响传动效率。
(3)动力分解与能量回馈功能 动力耦合器还要求允许将发动机动力的全部或一部分传递给驱动电动机,使驱动电动机转换为发电机发电;还可以在再生制动时回收能量,让驱动电机工作于发电状态,将机械能转换为电能进行存储。
(4)辅助功能 动力耦合器最好能充分发挥驱动电动机的低速大转矩的特点来启动HEV,利用驱动电动机反转的特点来使HEV倒车,从而取消驱动系统中的倒挡机构。由于发动机和电动机的功率和转速输出特性不同,动力耦合器需要满足多项复杂的动力传递、组合要求。
(二)新型动力耦合器的设计
所设计的新型动力耦合器主要是运用于基于CVT的类菱形混合动力汽车(qr_HEV)上。由于类菱形汽车的结构特点,决定了只能采用后置中驱动方式。经过反复思考,qr_HEV采用的动力耦合器是常用作差速器的2K2H型锥齿轮负号机构行星齿轮传动系,按啮合方式为ZUWGW型[1]。简单地说,是将汽车上常用的差速器反其道而用之,即动力从差速器两边输入,由行星齿轮架将合成的动力再输出到CVT上。
从大量文献查阅来看,这种形式的动力耦合器在混合动力汽车中没有人使用过。
许多文献中,都有论及行星轮系的详细关系式,如式(1)及式(2)。
 nload="javascript:if(>740)=740" align=center border=0>
nload="javascript:if(>740)=740" align=center border=0>
但这些公式都是以圆柱齿轮的行星齿轮系(如图2)为例进行计算推导说明的。从感官上说,差速器与行星齿轮系虽同属行星齿轮系,但结构上还是有很大区别的。传统上,差速器动力是从行星齿轮架上输入从两端输出的;将动力从两端输入而从行星齿轮架上输出虽在纺织行业上有广泛工程应用,但都是基于封闭式差动轮系的[2-4],因此所得结论能不能运用于HEV中,还是一个未知量。
 nload="javascript:if(>740)=740" align=center border=0>
nload="javascript:if(>740)=740" align=center border=0>
三、ADAMS建模与仿真
作为一款新兴的、优秀的动力学仿真软件,美国MDI公司的ADAMS正在引起国内机械行业的高度重视。ADAMS即机械动力学分析软件,它集建模、求解、可视化技术于一体,是世界上最具权威、使用最为广泛的机械系统动力学分析软件[5]。该仿真软件采用虚拟样机技术,提供了与其它CAD软件(如MatriXx)的接口,可方便快捷地建立机械动力学模型,支持Fortran和C/C 语言,便于用户进行二次开发,在汽车、航天等领域的并行工程中得到了广泛应用[6-7]。
由于qr_HEV的新型传动系统造价较贵,如若采用全部实物制作或购置完成后再进行试验,有可能造成巨大的经济损失,同时增加了新型传动系统的研制周期。而采用虚拟样机技术,不但可以缩短研究周期,而且可以减少研制经费。
(一)ADAMS建模
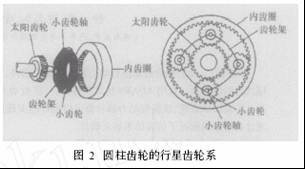
基于以上思考,作者首先应用计算机的可视化技术和参数化造型与建模能力,在qr_HEV耦合器的设计阶段进行三维实体模型构造,即运用UG软件构建了耦合器的三维模型,如图3所示。然后,将耦合器的UG模型导入ADAMS软件中,并根据ADAMS软件的运行要求构建了ADAMS模型。最后根据相关的理论进行机构的运动学分析,模拟系统在不同条件下的运动与受力情况,最终获得了qr_HEV耦合器的运动与力学特性。在此基础上可以对装置进行必要的优化设计处理,从而提高qr_HEV耦合器的设计水平。
 nload="javascript:if(>740)=740" align=center border=0>
nload="javascript:if(>740)=740" align=center border=0>
由于是进行定性分析,对动力耦合器模型进行了必要的简化。为了建模的方便,特对图3中4个齿轮做如下定义:下齿轮为a,右齿轮为b,上齿轮为c,左齿轮为d,中间横轴为e,竖轴为f。图中,齿轮b和d为动力输入端,分别接发动机与电动机;齿轮a和c共同构成了行星齿轮架,为动力输出端,行星齿轮架的转速与转矩经与其相啮合的锥齿轮而输出(图中略)。行星齿轮架一般有3~4个小齿轮,在此简化为a、c两个。横轴e在实际中并不存在,为建模的方便而加入,主要是作为齿轮运动时的参照物;竖轴f是存在的,图中与横轴e相固接,也主要作为运动参照物。各齿轮之间的运动关系根据实际情况作了以下确定:齿轮b和d绕e作自转,齿轮a和c不仅需要作垂直于竖轴f平面的自转,还需要作绕横轴e作公转运动。因此建模过程中,在a和e、d和e、c和e、b和e以及e和ground之间各有1个旋转副;在a和b、b和c、c和d以及a和d之间各有1个齿轮副。运动副与驱动力根据运动需求进行施加,最终形成了ADAMS模型。
(二)ADAMS仿真
根据新型动力耦合器的功能要求,在ADAMS仿真模型中进行了以下几种情况的仿真。
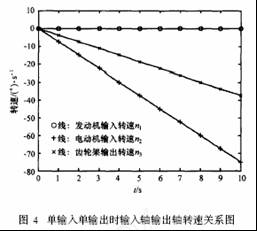
(1)单输入单输出仿真 动力由发动机端或电动机端输入,从行星齿轮架输出。此过程相当于HEV的纯电动或纯内燃机模式,其操作是将动力输入端处于制动解除、离合器接合状态,非动力输入端处于制动执行、离合器脱离状态。ADAMS模型中是动力输入端转速线性增加,非动力输入端转速置零,所得动力输出端转速、转矩变化分别如图4、图5所示,可见动力输出端转速是动力输入端转速的一半,而动力输出端转矩是动力输入端转矩的2倍。
 nload="javascript:if(this.Width>740)this.width=740" align=center border=0>
nload="javascript:if(this.Width>740)this.width=740" align=center border=0>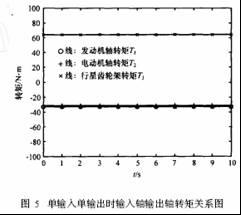 nload="javascript:if(>740)=740" align=center border=0>
nload="javascript:if(>740)=740" align=center border=0>
(2)双输入单输出仿真 动力从发动机端和电机端同时输入,由行星齿轮架输出。这一过程相当图4 单输入单输出时输入轴输出轴转速关系图图5 单输入单输出时输入轴输出轴转矩关系图于HEV的混合驱动模式。此时的操作是将2个动力输入端均处于制动解除、离合器接合状态。
ADAMS模型中是2个动力输入端转速按不同速率线性增加,动力输出端转速、转矩变化图类似于图4及图5,动力输出端转速是2个动力输入端转速和的一半,而动力输出端转矩是动力输入端转矩的2倍,且2个动力输入端转矩基本相等。
(3)单输入双输出仿真 动力从发动机端输入,由行星齿轮架和电动机端输出。这一过程相当于HEV的在线充电驱动模式。此时的操作是2个制动器均处于制动解除、2个离合器处于接合状态,且电动机处于恒速发电反转状态。ADAMS模型中是发动机输入端转速线性增加,电动机输出端转速恒速并反转,所得行星齿轮架输出端转速、转矩变化分别类似于图4及图5,行星齿轮架输出转速是发动机转速与发电机转速差的一半,而行星齿轮架输出转矩是发动机输入转矩的2倍,且发动机转矩与发电机转矩基本相等。
(4)制动发电模式仿真 当动力从行星齿轮架端输入,发动机端处于制动、离合器脱离状态,电动机工作于发电状态,则可进行制动能量回馈。此时输入与输出转速、转矩关系也分别类似于图4及图5,发电机输出转速是行星齿轮架输入转速的2倍,而发电机输入转矩是行星齿轮架输入转矩的一半。
(5)发动机驻车发电模式仿真 当车辆处于驻车状态,发动机正常运转,电动机工作于发电状态,则可以进行发动机驻车发电模式。此时,行星齿轮架处于制动状态,全部离合器接合、制动器解除,此时所得的输入与输出转速、转矩关系非常简单:转速相等,运动方向相反,转矩相等反相。
(三)仿真与试验结果对比
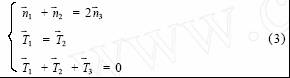
对以上仿真数据进行处理,可以得出新型动力耦合器转速与转矩的关系式
 nload="javascript:if(>740)=740" align=center border=0>
nload="javascript:if(>740)=740" align=center border=0>
此关系式等同于式(1)、式(2)中kp=1时的情况,说明式(1)和式(2)具有广泛意义。至于仿真数据并未能使等号严格成立是由于:(1)将UG模型转换为ADAMS模型时,齿轮啮合部位未能做到精确定位,在输入齿轮的两端数据点的半径并不相等造成转速数据不严格相等;(2)在ADAMS模型中,考虑了传动效率因素,致使转矩数据不严格相等。
值得说明的是式(3)采用的是矢量表示方式,其中的转速与转矩既有方向又有大小。
为验证以上结论的正确性,对一车用差速器进行了改装,用2台电机/发电机进行驱动模拟,并进行了以上同样试验,在消除传动效率及主减速比的影响因素下,试验结果与仿真结果吻合良好,说明仿真结果可信。
四、结论
在全面总结HEV中动力耦合器功能要求的基础上,进行了一款新型动力耦合器的设计,即采用ZUWGW型2K2H型锥齿轮负号机构行星齿轮轮系作为HEV的动力耦合器,用ADAMS软件对机构进行了仿真,并开展了相应试验。结果表明,在混合动力车上使用这种类型的耦合器是可行的,完全可以达到预期的目标。