
现在用功能强大的UG软件作为设计分析工具提高了工作效率与工作质量,同时通过UG运动模块的动态模拟分析更便于对设计结果的验证与检查、评审。转向分析是开发新车新型换装车桥过程中重要的设计分析环节。大大提高了设计的准确性,设计结果与实际产品状态非常一致。本文主要对UG运动分析模块在转向分析中的应用做详细的介绍。
运动分析模型的建立:
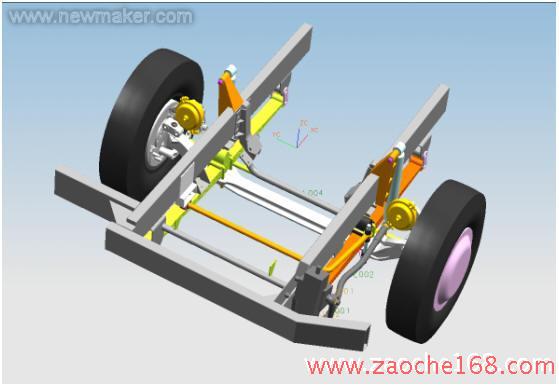
根据转向系设计参数、产品图纸对转向分析所涉及的部件进行了建模。建模部件如下:车架总成(前面部分)、前桥总成、车轮总成、转向系统各部件、前悬架系统各部件。建模如下图:
 nload="javascript:if(>740)=740" align=center border=0>
nload="javascript:if(>740)=740" align=center border=0>
建模过程:
1.根据设计参数及零件图建立各个零件的数模,尽量做成实体。通过对转向运动特点的分析可确定哪些部件只做出外形尺寸即可不需要做其内部结构,哪些部件要做出具体的结构。这样可以简少建模时间,提高工作效率。
2.建立装配主模型。把建好的各个部件按底盘布置参数要求装配好。
3.检查及评审装配主模型,准备进入运动分析模块。
运动分析:
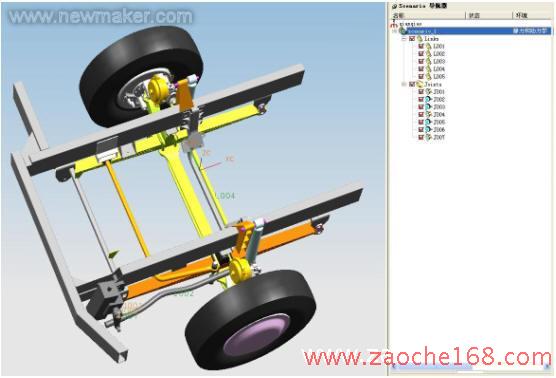
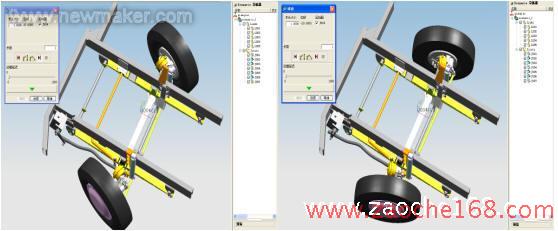
进入UG运动分析模块,创建机构Scenario模型如下图:
 nload="javascript:if(>740)=740" align=center border=0>
nload="javascript:if(>740)=740" align=center border=0>
1.设置机构分析环境为动态,即调用了静力和动力学仿真分析算解器。
2.运动分析名称为默认的scenario_1。
3.进入运动分析参数预设置,改变图标比例为3,角度单位为度,设置全局重力系数如下:
 nload="javascript:if(>740)=740" align=center border=0>
nload="javascript:if(>740)=740" align=center border=0>
因为考虑到转向分析的特点,转向纵拉杆两头由球面副连接,拉杆形状为在沿Y方向的拉杆轴平面上向内弯(为左转向轮转向运动让空间),故设置重力系数为Gy=1,以保证拉杆在运动分析过程中内弯形状一直沿Y方向。其它部件由于受运动副限制其运动不受此参数影响。(以上关于球面副运动问题,我认为软件应该有所改进,使分析过程的参数与实际情况更一致)
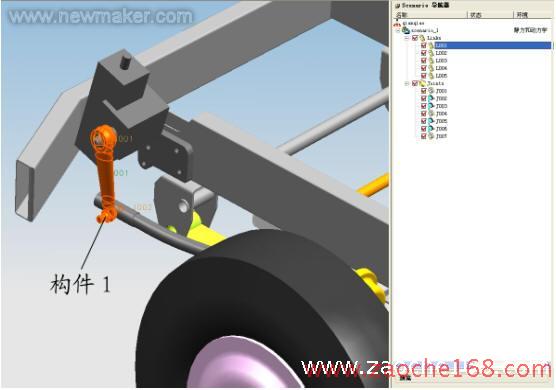
4.创建构件(links)
根据转向分析的需要,这里创建了5个构件。如图所示:
 nload="javascript:if(>740)=740" align=center border=0>
nload="javascript:if(>740)=740" align=center border=0>
构件1(L001): 转向垂臂与转向纵拉杆前球头
 nload="javascript:if(>740)=740" align=center border=0>
nload="javascript:if(>740)=740" align=center border=0>
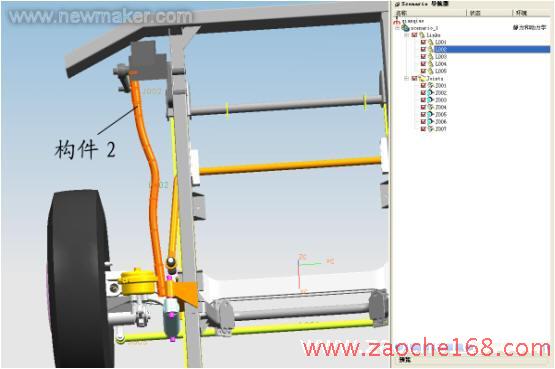
构件2(L002): 转向纵拉杆 (不含前后球头)
 nload="javascript:if(>740)=740" align=center border=0>
nload="javascript:if(>740)=740" align=center border=0>
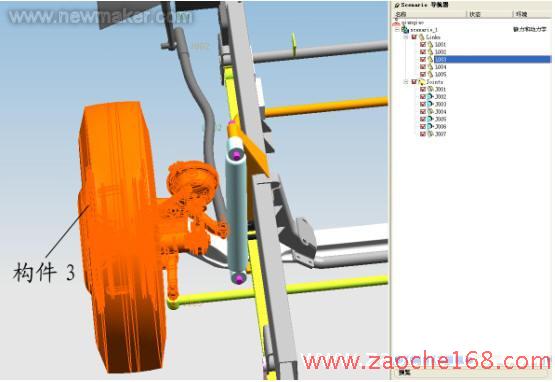
构件3(L003):左转向轮总成与上转臂、转向纵拉杆后球头、下转臂、转向横拉杆左球头
 nload="javascript:if(>740)=740" align=center border=0>
nload="javascript:if(>740)=740" align=center border=0>
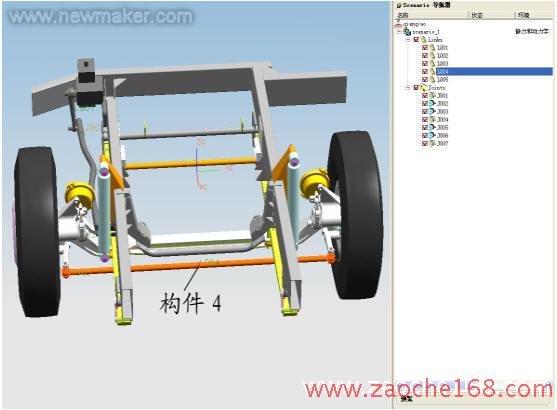
构件4(L004): 转向横拉杆 (不含左右球头)
 nload="javascript:if(>740)=740" align=center border=0>
nload="javascript:if(>740)=740" align=center border=0>
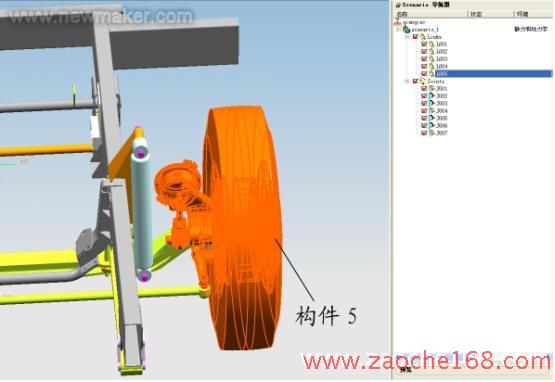
构件5(L005): 右转向轮总成与下转臂、转向横拉杆右球头
5.创建运动副(Joints)
根据转向分析的特点,这里创建了7个运动副。如图所示:
 nload="javascript:if(>740)=740" align=center border=0>
nload="javascript:if(>740)=740" align=center border=0>
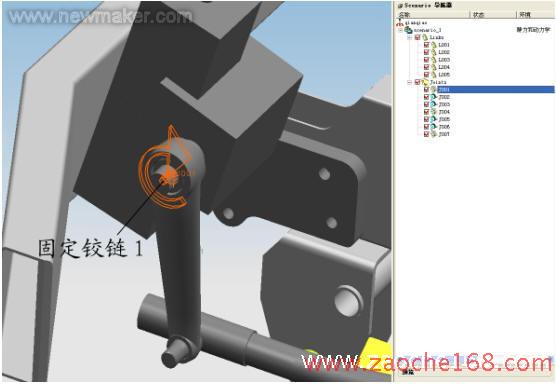
运动副1(J001): 构件1(L001)与机架组成的固定铰链 J001,作为原动件,运动驱动为球铰。
 nload="javascript:if(>740)=740" align=center border=0>
nload="javascript:if(>740)=740" align=center border=0>
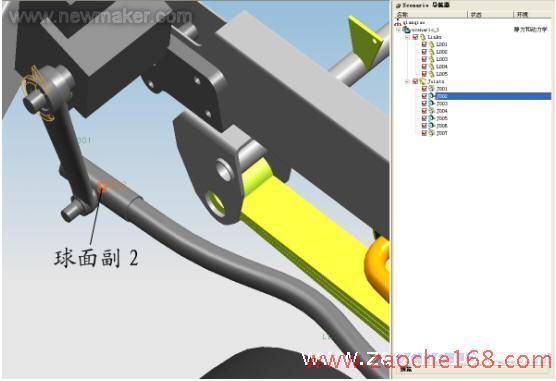
运动副2(J002): 构件1(L001)与构件2(L002)组成的球面副 J002
 nload="javascript:if(>740)=740" align=center border=0>
nload="javascript:if(>740)=740" align=center border=0>
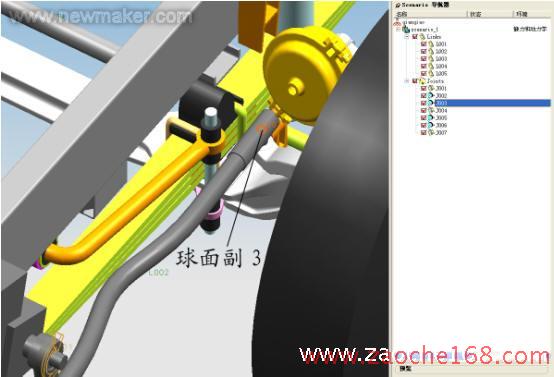
运动副3(J003): 构件2(L002)与构件3(L003)组成的球面副 J003
 nload="javascript:if(>740)=740" align=center border=0>
nload="javascript:if(>740)=740" align=center border=0>
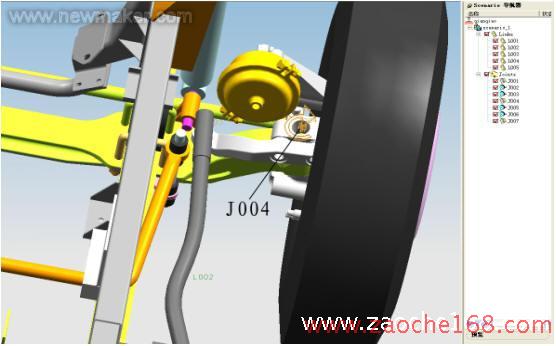
运动副4(J004): 构件3(L003)与机架组成的固定铰链 J004
 nload="javascript:if(>740)=740" align=center border=0>
nload="javascript:if(>740)=740" align=center border=0>
运动副5(J005): 构件3(L003)与构件4(L004)组成的球面副 J005
 nload="javascript:if(>740)=740" align=center border=0>
nload="javascript:if(>740)=740" align=center border=0>
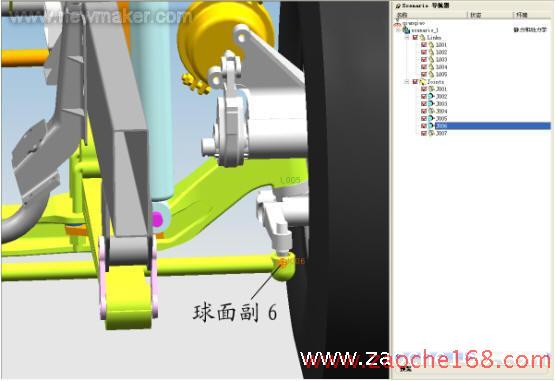
运动副6(J006): 构件4(L004)与构件5(L005)组成的球面副 J006
 nload="javascript:if(>740)=740" align=center border=0>
nload="javascript:if(>740)=740" align=center border=0>
运动副7(J007): 构件5(L005)与机架组成的固定铰链 J007
至此,该运动机构创建完毕。
6.对机构运动进行动态仿真
1)进入基于位移的机构动态仿真。如图:
 nload="javascript:if(>740)=740" align=center border=0>
nload="javascript:if(>740)=740" align=center border=0>
分析时单击 单步向前、单步向后 按钮,对轮转向进行动态的观察。通过观察可以检查出车轮作转向运动时相关部件间有无运动干涉情况、运动中各部件的间隙是否足够。根据检查结果来调整布置方案或重做部件设计。根据以上分析确定了前减震器的安装位置。
以下为分析过程截图:
 nload="javascript:if(>740)=740" align=center border=0>
nload="javascript:if(>740)=740" align=center border=0>
分析过程动画见 (MPEG视频文件,用realplayer播放)
2)转向纵拉杆形状设计
把运动副4(J004)作为原动件,运动驱动为球铰,同时改运动副1(J001)为从动件如图:
 nload="javascript:if(>740)=740" align=center border=0>
nload="javascript:if(>740)=740" align=center border=0>
根据汽车转向理论及本车的具体参数,算出的转向轮内、外转角值作为J004转角范围带入机构动态仿真分析中,可以模拟出转向的全过程。并得出车轮转到转角极限位置时左侧车轮与转向纵拉杆的相对位置及最小间隙。如图:
 nload="javascript:if(>740)=740" align=center border=0>
nload="javascript:if(>740)=740" align=center border=0>
由此结果可以得出转向纵拉杆内弯的具体形状,以便使左轮内转到极限角度时转向纵拉杆与左轮不发生干涉。(注:以上分析涉及的具体参数省略)
结论:
以上分析是一个从 设计→分析验证→设计改进→分析验证 的反复过程。
通过多次的分析最终使设计更优化、更合理。以上设计已用在实际的车型上,通过真车试制与道路实验的验证,证明以上设计是成功的。同时说明应用UG软件进行设计与分析,可以提高工作效率,简化工作难度,节约开发周期与费用。
相关链接:
?
?
?
?
?
?
?
?
?
?
